
海底空间资源丰富且与人类未来发展密切相关。当前深海探测与作业技术已被列入国家安全与战略利益技术体系,是海洋战略前沿领域。由于深海空间处于高压、低温、通信拒止等极端环境下,人力因素很难及时介入和精确干预深海探测与开发过程,因此深海探测与开发装备【目前常用的海洋探测与开发装备包括:无人水下航行器(UUV,Unmanned Underwater Vehicle)、遥控式水下潜水器(ROV,Remote Operated Vehicle)、载人潜水器(HOV,Human Occupied Vehicle)等】必须具备自主作业能力和高度智能以执行规定任务和处理突发事件。而高精度的导航信息是深海探测与开发装备自主化、智能化作业的基础(图1),并在一定程度上反映了其智能化水平。
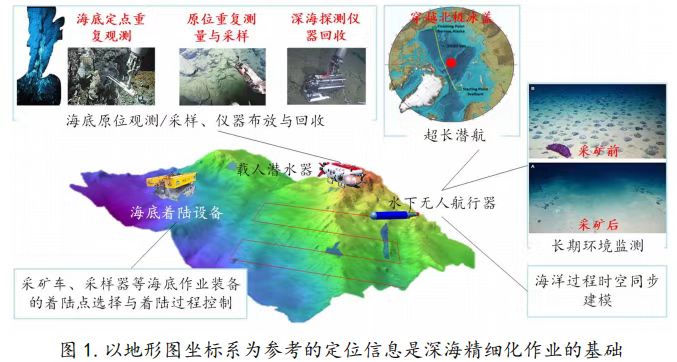
图1.基于地图空间的定位是深海精细化作业的基础
深海空间被海水隔绝,无法接收卫星定位信号;声学定位存在作用距离有限和定位信息时延问题,无法支持精细化的探测和作业任务;惯性导航信息存在随时间无限累计的现象,无法为大深度下潜和长时间潜航过程提供精确定位。因此,精确导航技术缺乏极大地制约了深海探测与开发装备的智能化水平,已经成为深海精细化探测与开发作业的瓶颈问题。海底地形匹配导航以地形特征为定位参考(图2),通过主动探测和跟踪地形特征获取水下航行器在先验地形图中的实时定位,且定位误差在时域和空域均有界。因此,地形匹配导航是实现深海水下航行器长期、稳定、高精度定位的重要突破口,也是水下航行器在深远海通信受限或拒止环境中实现完全独立、自主导航的关键、前沿技术。

图2.声学定位(左)与海底地形辅助导航(右)示意图
河海大学与哈尔滨工程大学水下机器人技术国家级重点实验室合作开展了深海地形辅助导航相关理论与技术研究,在系统高精度初始定位及置信区间估计(图3)、系统非线性滤波器高精度初始化、系统完备性仿真方面取得丰硕成果。开发了深海地形匹配导航系统全套仿真模块(图4),形成了综合性的深海地形匹配导航仿真系统,可开展任意深度、任意地形、任意载体条件的深海地形匹配导航系统全工况、完备性仿真测试。
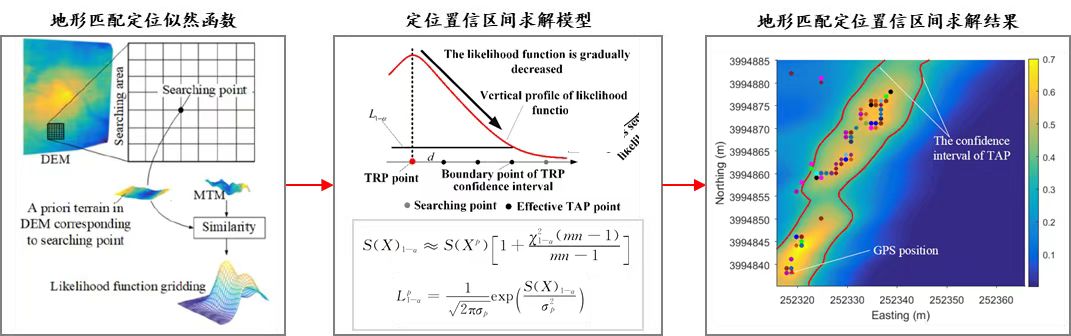
图3. 地形匹配定位的置信区间估计
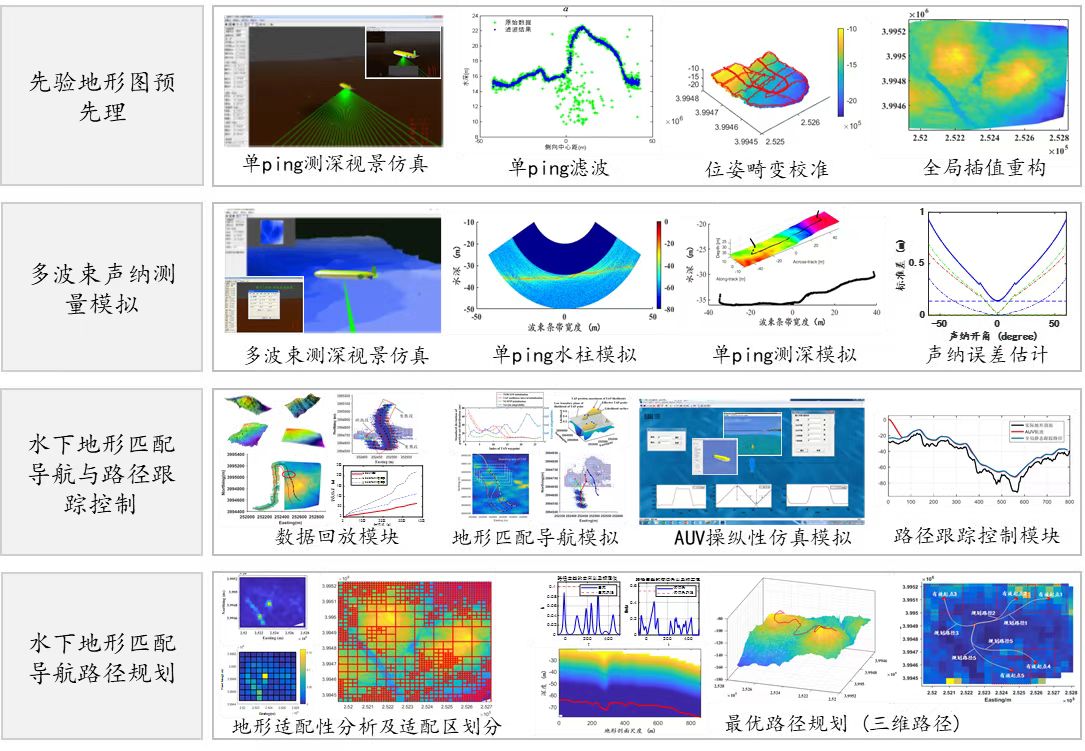
图4.具有自主知识产权的深海地形匹配导航系统全套仿真模块